Real-Time Stereo Camera (FPGA-Based)
## 주요 특징 (Features)
- FPGA 기반 하드웨어 가속: 고성능 FPGA를 활용하여 복잡한 스테레오 매칭 연산을 실시간으로 처리합니다.
- Trellis Dynamic Programming: 고급 동적 계획법 알고리즘을 적용하여 정밀하고 안정적인 변위 맵(Disparity Map)을 생성합니다.
- Systolic Array 구현: 병렬 처리 아키텍처인 시스톨릭 어레이를 통해 연산 효율을 극대화하고 지연 시간을 최소화했습니다.
- 다층 실시간 매칭: Multi-layered 리얼타임 이미지 매칭을 통해 깊이(Depth) 정보의 정확도를 높였습니다.
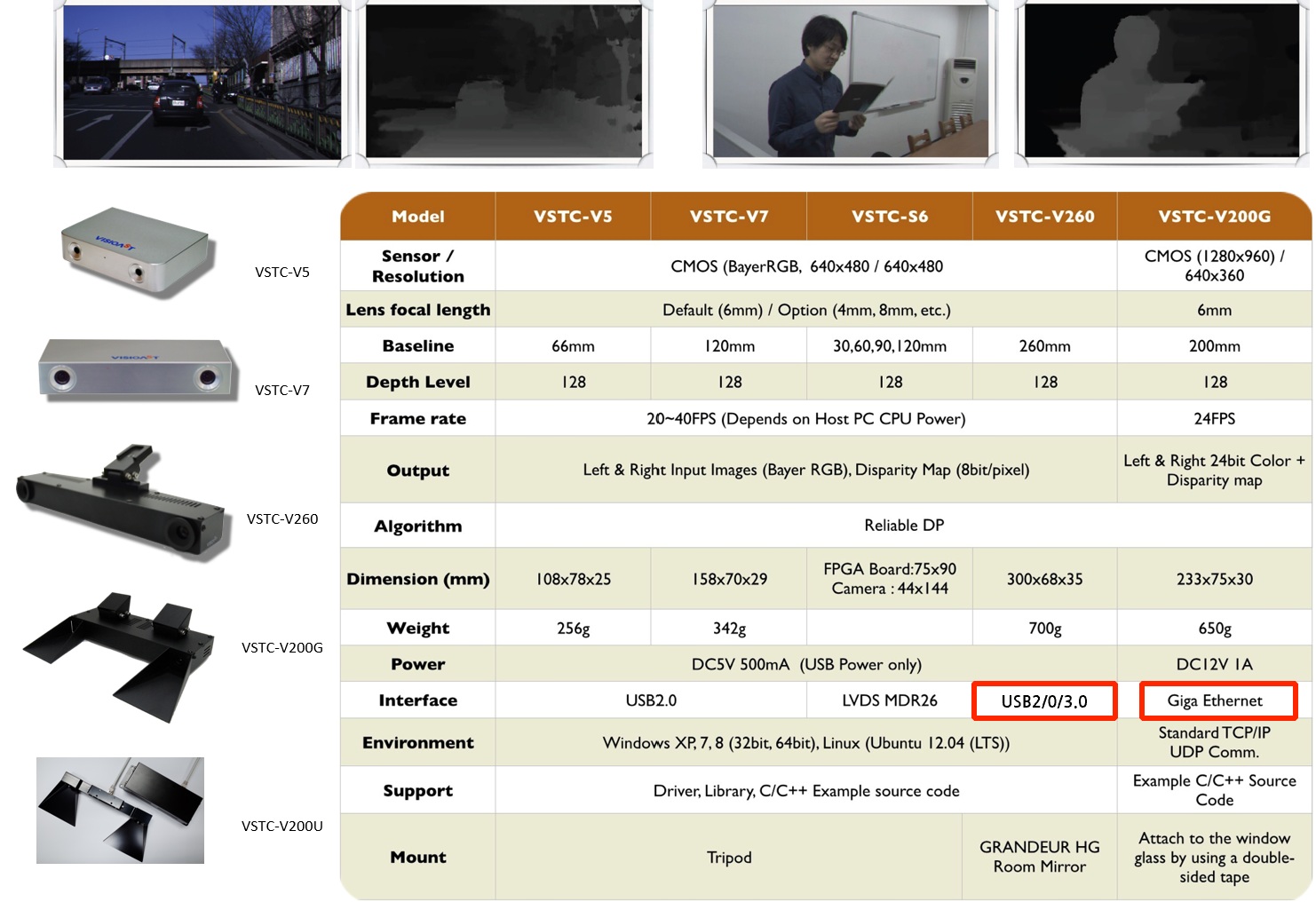
## 기술 사양 (Specifications)
| 항목 | 사양 | |:—|:—| | 핵심 알고리즘 | Trellis Dynamic Programming | | 하드웨어 아키텍처 | Systolic Array (FPGA Implementation) | | 주요 출력 | Real-time Stereo Disparity Map | | 처리 방식 | Multi-layered Stereo Matching |
## 활용 분야 (Applications)
- 3D 거리 측정 및 인식: 산업 현장에서의 객체와의 거리 측정 및 장애물 회피
- 자율 주행 로봇(AMR): 주변 환경의 깊이 정보를 실시간으로 파악하여 안전한 경로 생성
- 고속 공정 자동화: 3차원 위치 정보가 필요한 자동화 라인의 시각 센서